产品详情
六足机器人 NodeHexa
一个基于 ESP32 的六足机器人项目,同时额外支持四足构型固件;支持 Web 控制、校准、表演动作与动作序列
NodeHexa 是一个开源的六足机器人项目,基于 ESP32 微控制器开发。项目集成了运动学算法、Web 界面控制、实时校准与动作序列(运动规划)能力,面向机器人爱好者与研究用途。
六足机器人 NodeHexa一个基于 ESP32 的六足机器人项目,同时额外支持四足构型固件;支持 Web 控制、校准、表演动作与动作序列
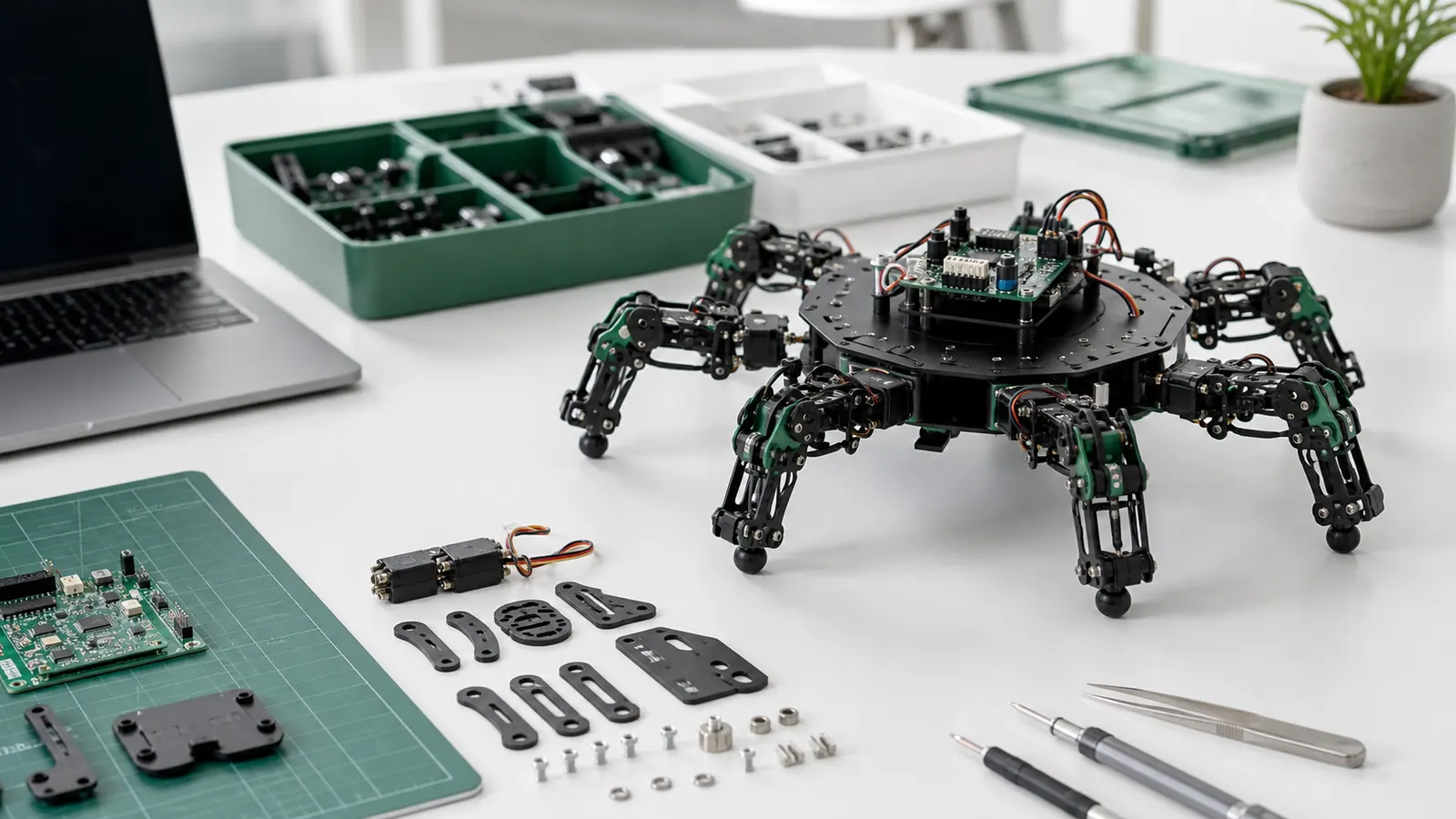
方案图示
展示产品在教学与交付场景中的典型使用方式。
产品特点
- 丰富运动模式支持移动、姿态变换、速度调节、表演等。
技术参数
适用场景
- 售前演示适用于展厅展示、客户交流、方案验证与需求澄清。
- 教学实验适合高校、培训机构或实验室做课程建设、实验编排与原型验证。
- 项目交付可结合官网技术博客和资料下载流程,形成从介绍到交付的完整闭环。
配套支持
- 淘宝购买实际下单在淘宝店完成,便于沿用现有交易和售后流程。
- 技术文章相关安装指导、案例与实施经验可在技术博客中继续阅读。
- 资料授权购买并注册后,客服可在后台为账号授予对应产品的下载权限。
资料下载说明
资料下载需购买后授权
官网下载中心与用户账号权限打通。请先在淘宝完成购买,再使用购买手机号注册官网账号,并联系人工客服完成产品授权。